
• มิตซูบิชิ ปาเจโร สปอร์ต
มิตซูบิชิ มอเตอร์ส มีภาพลักษณ์ของเทคโนโลยีรถแข่งมานาน รวมทั้งนักขับมือฉมัง เช่น ฮิโรชิ มาซูโอกะ, เคนจิโร่ ชิโนซูกะ, ทอมมี มาคิเนน, ริชาร์ด เบิร์นส์ (ผู้ล่วงลับ), พรสวรรค์ ศิริวัฒนกุล และ ตุลย์ สุวรรณรัตน์ นักขับชาวไทยเจ้าทะเลทรายรุ่น T2 และอีกอีกหลายคน ที่เคยขับมิตซูบิชิ ขับเคลื่อน 4 ล้อ บุกตะลุยบนเส้นทางทะเลทราย
มิตซูบิชิ ทำรถขับเคลื่อน 4 ล้อ มานานกว่า 80 ปี เริ่มต้นใน พ.ศ.2477 ด้วยรถต้นแบบ พีเอ็กซ์ 33 (Mitsubishi PX33) รถยนต์นั่งที่พัฒนาขึ้นเพื่อสนับสนุนงานกองทัพ เป็นรถซีดานรุ่นแรกของญี่ปุ่นที่ใช้ระบบขับเคลื่อน 4 ล้อแบบฟูลไทม์ ทั้งยังมีรุ่นย่อยที่ใช้เครื่องยนต์ดีเซลไดเรคอินเจคชั่นเป็นครั้งแรกของญี่ปุ่นภายใต้รหัส 445 เอดี (445AD) โครงการพีเอ็กซ์ 33 ยุติลงใน 3 ปีต่อมา
โครงการถูกเก็บไว้หลายทศวรรษ ก่อนการพัฒนาใหม่ และนำเสนอที่ โตเกียว มอเตอร์โชว์ พ.ศ.2516 ด้วยรถเปิดหลังคา เป็นต้นกำเนิด ปาเจโร จากนั้นรุ่นที่สองได้จัดแสดงอีกครั้งใน พ.ศ.2521 และเริ่มต้นการผลิตเพื่อจำหน่ายจริงใน พ.ศ.2525
สำหรับในสนามแข่งขันแรลลี่ข้ามประเทศที่หฤโหดที่สุดในโลก ครั้งแรกนั้น ปาเจโร ที่ปรับแต่งเล็กน้อยจบการแข่งขันระยะทาง 10,000 กิโลเมตรในอันดับที่ 11 ประเภทโอเวอร์ออล จากรถที่เข้าแข่งขันกว่า 100 คัน ก่อนจะกลับมาคว้าชัยชนะอย่างรวดเร็วในประเภทโอเวอร์ออลในการแข่งขันครั้งที่ 3 พ.ศ.2528
จากนั้น มิตซูบิชิ ลงแข่งขันในรายการดังกล่าวอย่างต่อเนื่องเป็นเวลา 25 ปี โดยคว้าชัยชนะ 12 ครั้งจากทั้งหมด 26 ครั้งที่เข้าร่วมการแข่งขัน (คว้าชัยชนะ 7 ครั้งติดต่อกันใน พ.ศ.2544 – 2550) ทำให้ ปาเจโร ได้รับฉายา “ราชาแห่งทะเลทราย” ได้รับการบันทึกจากกินเนสส์ เวิลด์ เรคคอร์ด ว่าเป็น “บริษัทผู้ผลิตที่คว้าชัยชนะการแข่งขันดาการ์แรลลี่มากที่สุด”
มิตซูบิชิ มอเตอร์ส ได้ใช้ประโยชน์จากเทคโนโลยี ระบบคอมพิวเตอร์และเทคโนโลยีอิเลกทรอนิก มาช่วยในการปรับจูนระบบสมรรถนะเพื่อรองรับการใช้งานในชีวิตประจำวัน ปรับตั้งโปรแกรมระบบขับเคลื่อนให้เหมาะสมกับการขับขี่มากยิ่งขึ้น

• ระบบขับเคลื่อน 4 ล้อ Super Select 4WD-II
ระบบขับเคลื่อน 4 ล้อ Super Select 4WD-II เป็นการผสมผสานระบบขับเคลื่อนสี่ล้อแบบฟูลไทม์และพาร์ทไทม์ ใช้ตัวควบคุมไฟฟ้าช่วยปรับเปลี่ยนโหมดการขับขี่แทนการควบคุมด้วยมือ มีโหมดการขับขี่ 4 รูปแบบ ดังนี้
- โหมด 2H ระบบขับเคลื่อน 2 ล้อ (2WD High-Range) ขับเคลื่อนล้อหลัง ลดแรงเสียดทานของชิ้นส่วนกลไกที่ไม่จำเป็น เพื่อให้มีความประหยัดน้ำมัน
- โหมด 4H ระบบขับเคลื่อน 4 ล้อ (4WD High-Range) ขับเคลื่อน 4 ล้อสำหรับถนนที่เปียกลื่น กำลังจะกระจายสู่ล้อหน้า-หลังแบบ 40-60 ส่วนบนถนนทั่วไป กำลังจะกระจายแบ่งเป็น 50-50 ระบบ Torque-Sensitive Type ทำงานในแบบ 4 ล้อแบบฟูลไทม์ (Full Time All Wheel Control)
- โหมด 4HLc ระบบขับเคลื่อนสี่ล้ออัตราทดความเร็วสูง (4WD High-Range with Locked Transfer) ระบบเฟืองท้ายกลาง (Center Differential Locked) ขับขี่ได้ประสิทธิภาพสูงขึ้นบนพื้นถนนที่ปกคลุมด้วยหิมะและลื่นไถล บนพื้นทรายและผิวถนนที่ขรุขระแบบอื่นๆ โดยมีการกระจายกำลังขับเคลื่อนสู่ล้อทั้ง 4 เท่ากัน
- โหมด4LLc ระบบขับเคลื่อนสี่ล้ออัตราทดความเร็วต่ำ (4WD Low-Range with Locked Transfer) ใช้เกียร์อัตราทดความเร็วต่ำและล็อกเฟืองท้ายกลางเมื่อต้องใช้แรงบิดมากขึ้นเพื่อผ่านอุปสรรคบนเส้นทางที่มีก้อนหินใหญ่หรือดินโคลน
นอกจากนี้ ระบบ Super Select 4WD-II ยังมีโหมดออฟโรด (Off-Road) ที่ยกระดับการยึดเกาะผ่านการปรับตั้งค่าในโหมดออฟโรดหลายรูปแบบ Gravel, Mud/Snow, Sand หรือ Rock แต่ละโหมดมีการทำงานของเครื่องยนต์และเบรกที่แตกต่างกันเพื่อเพิ่มสมรรถนะและการยึดเกาะ โหมดที่ถูกเลือกจะปรากฏขึ้นบนหน้าจอแสดงผล นอกจากนี้ยังรวมถึงระบบล็อกเฟืองท้าย (Rear Differential Lock) ที่ทำงานประสานกับตัวล็อกเฟืองกลาง ซึ่งเป็นระบบที่ติดตั้งอยู่ในรถเอสยูวีไม่กี่รุ่นในท้องตลาด เมื่อระบบนี้ทำงานจะล็อกเฟืองท้าย ทำให้มีการกระจายกำลัง 50-50
มิตซูบิชิ ปาเจโร สปอร์ต ขับเคลื่อนด้วยเครื่องยนต์รหัส 4N15 เทอร์โบแปรผันที่มีน้ำหนักเบา ลดเสียงรบกวน แรงสั่นสะเทือน และแรงสะท้าน (NVH) ตัวบล็อกอลูมิเนียม VG Turbo ขนาด 4 สูบความจุ 2.4 ลิตร MIVEC กำลัง 181 แรงม้าที่ 3,500 รอบต่อนาที แรงบิด 430 นิวตันเมตรที่ 2,500 รอบต่อนาที ซึ่งมีอัตราส่วนกำลังต่อความจุ 74 แรงม้าต่อลิตร และ 176 นิวตันเมตรต่อลิตร
เครื่องยนต์ 4N15 มีระบบขับเคลื่อนล้อหลังเป็นหลักผ่านเกียร์อัตโนมัติ 8 สปีด มีระบบ INC (Idling Neutral Control) ช่วยลดการสูญเสียพลังงานภายในตัวเครื่องยนต์อันเกิดจากแรงฉุดของทอร์กคอนเวอร์เตอร์เมื่อตัวรถหยุดนิ่งและเกียร์อยู่ในตำแหน่ง D จึงช่วยเพิ่มความประหยัดน้ำมันอีกทางหนึ่ง

• ระบบเตือนการชนด้านหน้าตรง พร้อมช่วยชะลอความเร็ว ใช้คลื่นสัญญาณเรดาร์ความถี่ระดับมิลลิเมตรในการประเมินระยะห่างกับรถคันหน้าและตรวจจับการชน ระบบนี้จะช่วยหลีกเลี่ยงการชนหรือบรรเทาความเสียหายจากการชน ด้วยการเตือนผู้ขับขี่และสั่งการระบบเบรกของรถ

• ระบบตัดกำลังเครื่องยนต์ชั่วขณะเมื่อเหยียบคันเร่งอย่างรุนแรงและรวดเร็ว ช่วยหลีกเลี่ยงการเร่งโดยไม่ตั้งใจขณะรถหยุดนิ่งหรือที่ความเร็วไม่เกิน 10 กม.ต่อชม.เซ็นเซอร์อัลตราโซนิคจะตรวจจับสิ่งกีดขวางด้านหน้าหรือด้านหลัง และจะตัดกำลังของเครื่องยนต์พร้อมกับแจ้งเตือนด้วยเสียงถ้าระบบตรวจจับว่าผู้ขับขี่มีการเร่งอย่างกะทันหันหรือรุนแรงขณะที่ยังมีสิ่งกีดขวางอยู่ในเส้นทางของรถ
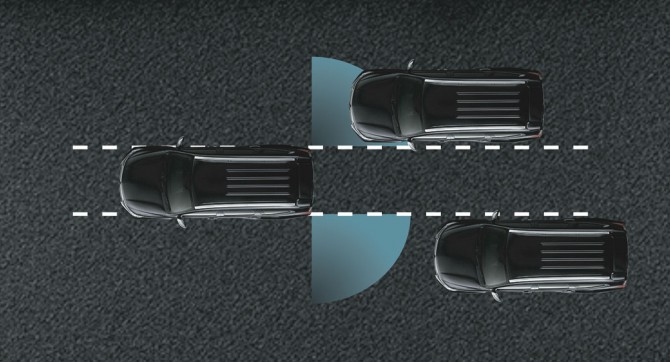
• ระบบเตือนบริเวณจุดอับสายตา เซ็นเซอร์อัลตราโซนิคที่ติดตั้งอยู่บนกันชนจะตรวจจับบริเวณมุมของตัวรถ สัญลักษณ์แจ้งเตือนจะปรากฏบนกระจกมองข้างของแต่ละฝั่งถ้าตรวจจับว่ามียานพาหนะอยู่ใกล้ในมุบอับสายตา
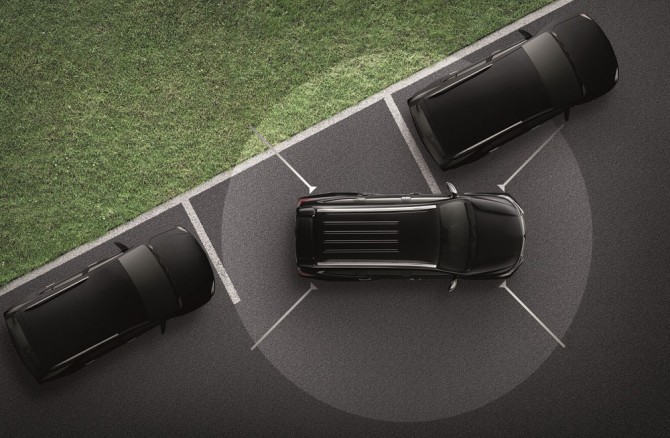
• กล้องมองภาพรอบคัน ทำงานด้วยกล้อง 4 ตัวที่ติดตั้งอยู่ด้านซ้ายและขวา รวมถึงด้านหน้าและหลังของตัวรถ เพื่อให้ผู้ขับขี่ได้เห็นภาพมุมสูงว่ามีสิ่งกีดขวางอยู่รอบคันรถหรือไม่ ภาพด้านหลังตัวรถจะแสดงขึ้นพร้อมกับเส้นกะระยะเพื่ออำนวยความสะดวกในการถอยจอด

• ถุงลมนิรภัย 7 ตำแหน่ง ได้แก่ คู่หน้าและด้านข้างสำหรับผู้ขับขี่และผู้โดยสาร บริเวณหัวเข่าของผู้ขับขี่ และม่านนิรภัยที่ปกป้องครอบคลุมเบาะแถวที่สาม
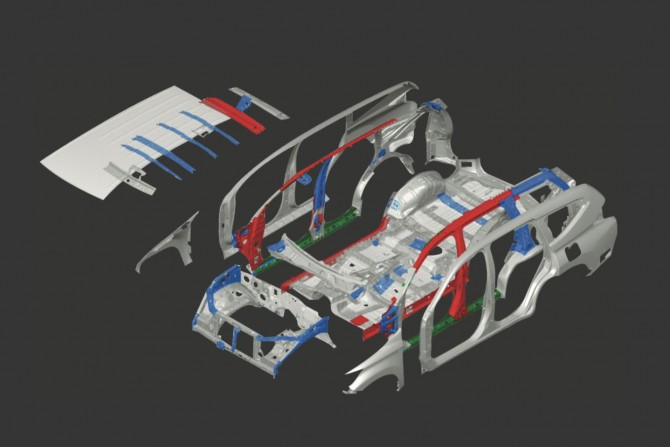
• โครงสร้างตัวถังนิรภัยเหล็กกล้า มีความแข็งแรงและมีแรงดึงสูง เพื่อสร้างคุณสมบัติการดูดซับแรงกระแทกจากทุกทิศทาง คุณสมบัติคล้ายกับโครงเหล็กนิรภัยที่ใช้ในรถแข่งของ
มิตซูบิชิ มอเตอร์ส










.gif)







